Yewei Huang

I am Yewei Huang, and my research focuses on the autonomous decision-making and perception challenges of robots. I have a special passion for marine environments—fueled by my love of sharks 🦈—and I am particularly interested in deploying autonomous algorithms for underwater and offshore applications.
I am currently a postdoctoral researcher in the Reality and Robotics Lab at the Department of Computer Science, Dartmouth College, advised by Prof. Alberto Quattrini Li. I received my Ph.D. in Mechanical Engineering from Stevens Institute of Technology advised by Prof. Brendan Englot. I hold a Master’s degree in Surveying Engineering and a Bachelor’s degree in Geo-Information Systems, both from Tongji University in Shanghai, China, where I was advised by Prof. Tiantian Fen and Prof. Junqiao Zhao.
By combining my background in robotics and geo-information science, my long-term goal is to enable fully autonomous robots that can support the maintenance of underwater infrastructures and monitor the complex hydrodynamic and environmental conditions of offshore ecosystems.
Research
My research focuses on autonomous perception, mapping, and decision-making for mobile robots. A central question I address is:
“How can multiple robots operate effectively and efficiently under limited communication bandwidth?”
My focus area include:
- Communication Efficient Multi-robot SLAM

Disco-SLAM: Distributed scan context-enabled multi-robot LiDAR SLAM with two-stage global-local graph optimization
IEEE Robotics and Automation Letters 2022
Available at IEEE Xplore | Github
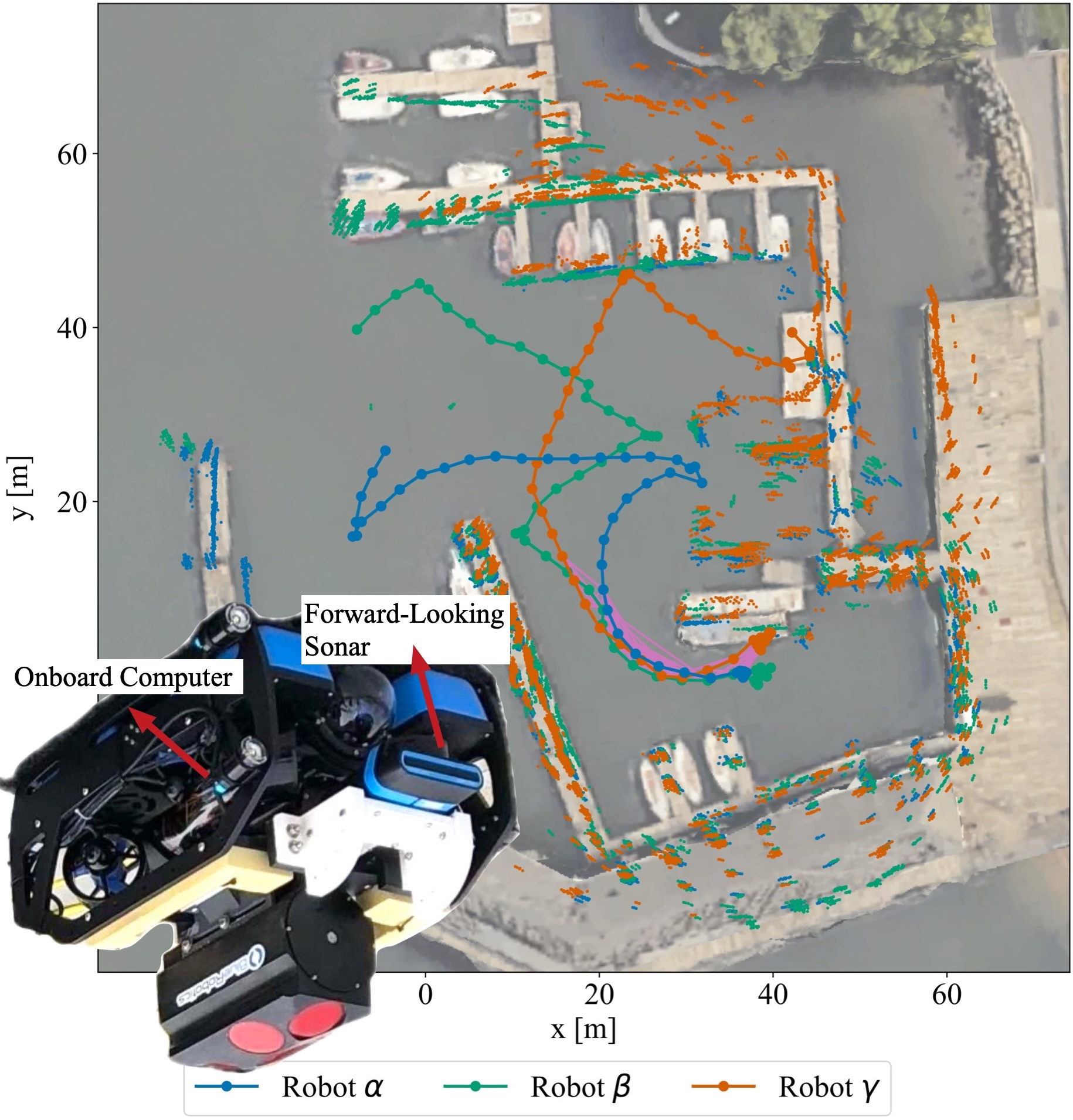
DRACo-SLAM2: Distributed Robust Acoustic Communication-efficient SLAM for Imaging Sonar Equipped Underwater Robot Teams with Object Graph Matching
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025)
Communication Efficient Scene Graph SLAM
Under Review
- Reliable and Efficient Robot Exploration
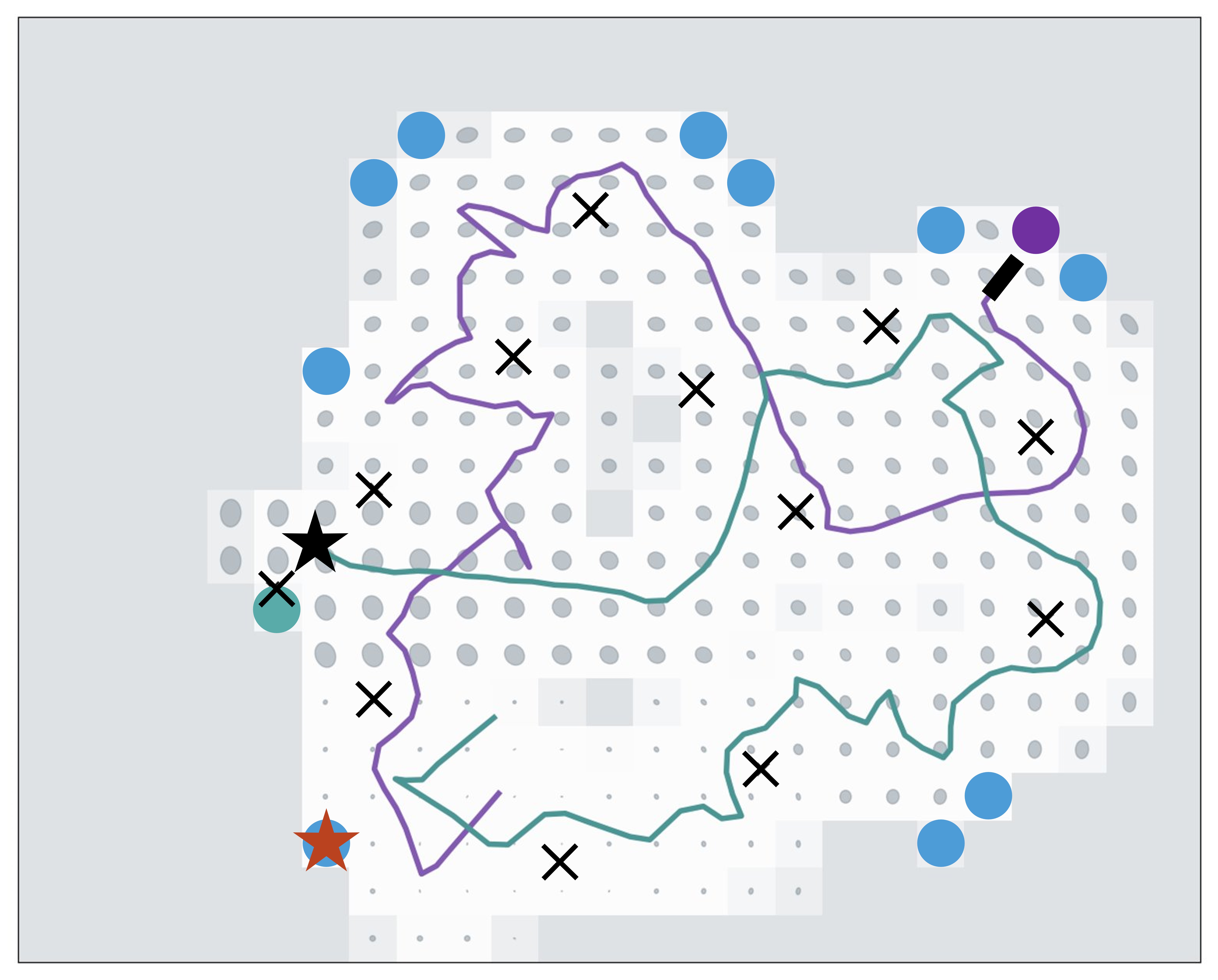
Decentralized multi-robot navigation for autonomous surface vehicles with distributional reinforcement learning
IEEE International Conference on Robotics and Automation (ICRA 2024)
Available at IEEE Xplore | Github
- Planning and decision making in hydrodynamic environments
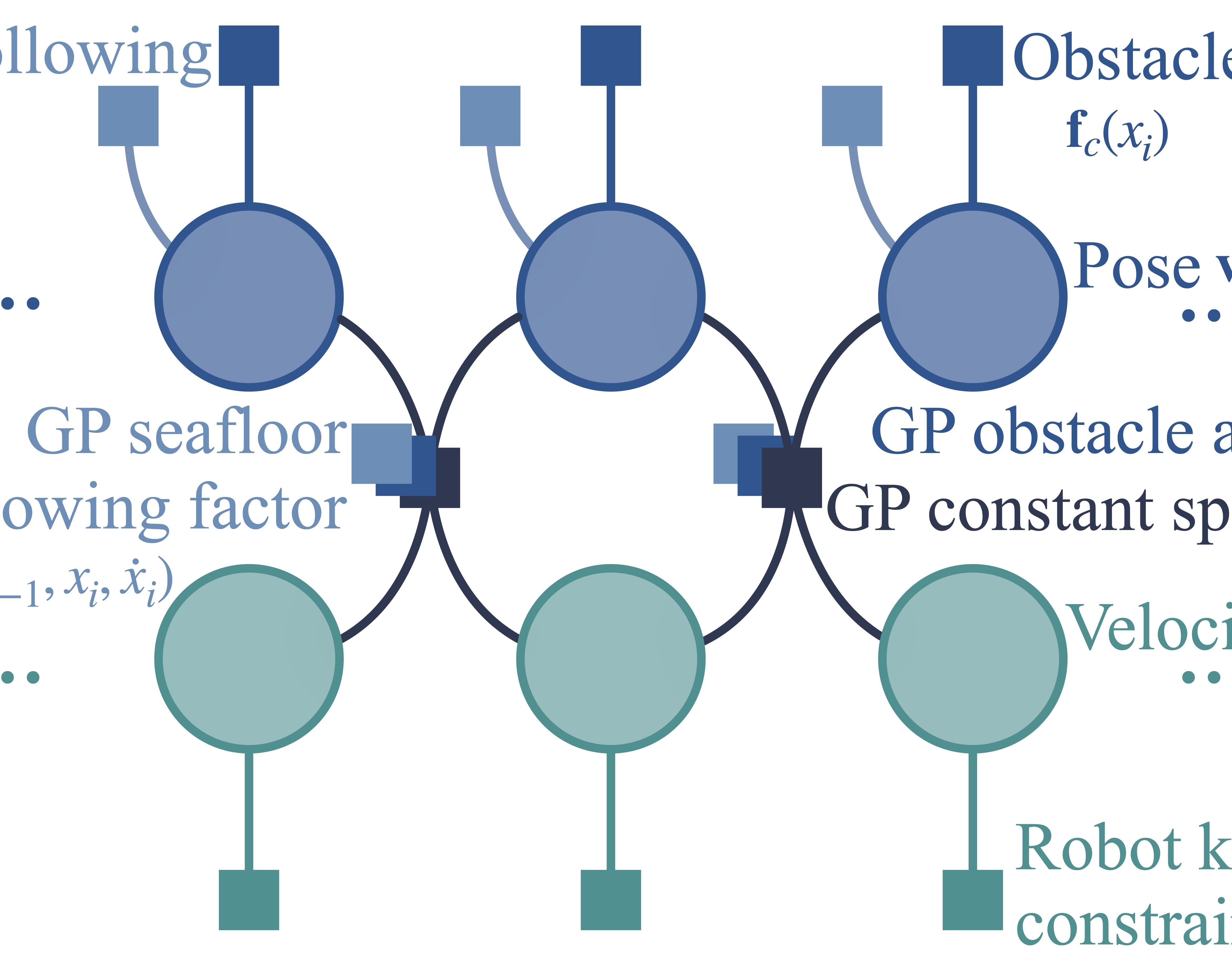
Mission-Oriented Gaussian Process Motion Planning for UUVs Over Complex Seafloor Terrain and Current Flows
IEEE Robotics and Automation Letters 2024
Available at IEEE Xplore | Github
Publications
Refereed Conference and Journal Publications
2025
Y. Huang, J. McConnell, X. Lin, and B. Englot, "DRACo-SLAM2: Distributed Robust Acoustic Communication-efficient SLAM for Imaging Sonar Equipped Underwater Robot Teams with Object Graph Matching," IEEE/RSJ International Conference on Intelligent Robots and Systems, October 2025. (Link to arXiv preprint, Video Attachment, Code Release)
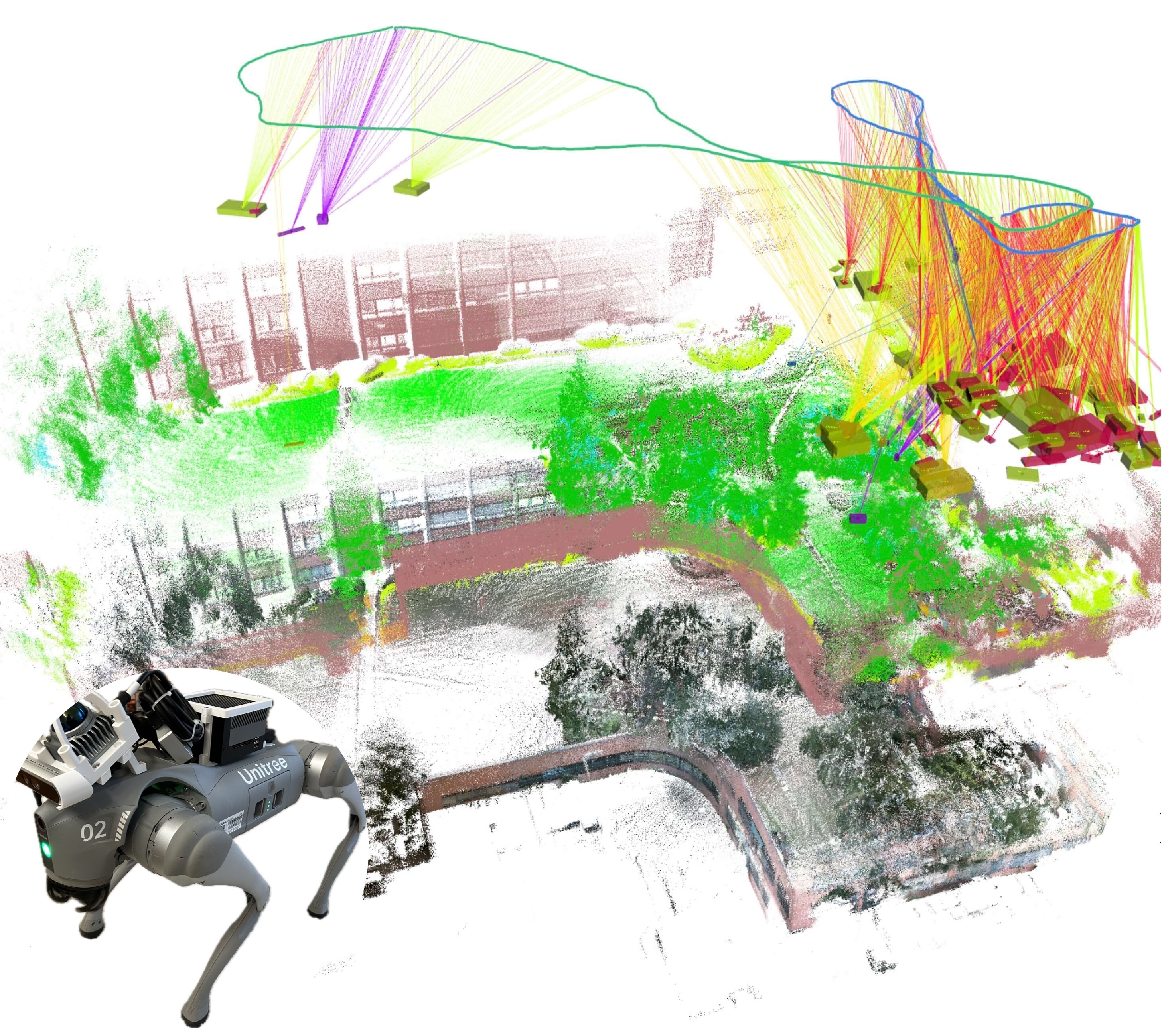
Y. Li, Y. Huang, B. Gaudel, H. Jafarnejadsani, and B. Englot, "CVD-SfM: A Cross-View Deep Front-end Structure-from-Motion System for Sparse Localization in Multi-Altitude Scenes," IEEE/RSJ International Conference on Intelligent Robots and Systems, October 2025. (Link to arXiv preprint, Video Attachment, Code Release)
Y. Li, Y. Huang, W. Gaozhang, and Y. Liu, "Autonomous Exploration with Virtual Map using Un- manned Surface Vehicles," IEEE International Conference on Automation and Computing (ICAC), pp. 1-7, August 2025. (Link to IEEExplore)
X. Lin, P. Szenher, Y. Huang, and B. Englot, "Distributional Reinforcement Learning based Integrated Decision Making and Control for Autonomous Surface Vehicles," IEEE Robotics and Automation Letters, vol. 10(2), pp. 1194-1201, February 2025. (Link to IEEExplore, Link to arXiv preprint, Video Attachment, Code Release)
2024
Y. Huang, X. Lin, and B. Englot, "Multi-Robot Autonomous Exploration and Mapping Under Localization Uncertainty with Expectation-Maximization," Proceedings of the IEEE International Conference on Robotics and Automation, pp. 7236-7242, May 2024. (Link to IEEExplore, Link to arXiv preprint, Video Attachment, Code Release)
X. Lin, Y. Huang, F. Chen, and B. Englot, "Decentralized Multi-Robot Navigation for Autonomous Surface Vehicles with Distributional Reinforcement Learning," Proceedings of the IEEE International Conference on Robotics and Automation, pp. 8327-8333, May 2024. (Link to IEEExplore, Link to arXiv preprint, Video Attachment, Code Release)
Y. Huang, X. Lin, M. Hernandez-Rocha, S. Narain, K. Pochiraju, and B. Englot, "Mission-oriented Gaussian Process Motion Planning for UUVs over Complex Seafloor Terrain and Current Flows," IEEE Robotics and Automation Letters, vol. 9(2), pp. 1780-1787, February 2024. (Link to IEEExplore, Video Attachment, Code Release)
2023
X. Lin, Y. Huang, D. Sun, T.-Z. Lin, B. Englot, R.M. Eustice, and M. Ghaffari, “A Robust Keyframe-Based Visual SLAM for RGB-D Cameras in Challenging Scenarios,” IEEE Access, vol. 11, pp. 97239-97249, September 2023. (Link to IEEExplore)
2022
J. McConnell, Y. Huang, P. Szenher, I. Collado-Gonzalez, and B. Englot, "DRACo-SLAM: Distributed Robust Acoustic Communication-efficient SLAM for Imaging Sonar Equipped Underwater Robot Teams," Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 8457-8464, October 2022. (Link to IEEExplore, Link to arXiv preprint, Link to Presentation, Video Attachment, Code Release)
J. Wang, F. Chen, Y. Huang, J. McConnell, T. Shan, and B. Englot, "Virtual Maps for Autonomous Exploration of Cluttered Underwater Environments," IEEE Journal of Oceanic Engineering, vol. 47(4), pp. 916-935, October 2022. (Link to IEEExplore, Link to arXiv preprint, Video Attachment, Code Release)
Y. Huang, T. Shan, F. Chen, and B. Englot, "DiSCo-SLAM: Distributed Scan Context-Enabled Multi-Robot LiDAR SLAM with Two-Stage Global-Local Graph Optimization," IEEE Robotics and Automation Letters, vol. 7(2), pp. 1150-1157, April 2022. (Link to IEEExplore, Link to ResearchGate preprint, Video Attachment, Code Release)
2021
F. Chen, P. Szenher, Y. Huang, J. Wang, T. Shan, S. Bai, and B. Englot, "Zero-Shot Reinforcement Learning on Graphs for Autonomous Exploration Under Uncertainty," Proceedings of the IEEE International Conference on Robotics and Automation, pp. 5193-5199, June 2021. (Link to IEEExplore, Link to arXiv preprint, Link to Presentation, Video Attachment)
F. Chen, J.D. Martin, Y. Huang, J. Wang, and B. Englot, "Autonomous Exploration Under Uncertainty via Deep Reinforcement Learning on Graphs," Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 6140-6147, October 2020. (Link to IEEExplore, Link to arXiv preprint, Link to Presentation, Video Attachment)
2018
Y. Huang, J. Zhao, X. He, S. Zhang, T. Feng, "Vision-based semantic mapping and localization for autonomous indoor parking," IEEE Intelligent Vehicles Symposium (IV), pp. 636-641, June 2018. (Link to IEEExplore)
Other Publications
K. Doherty, A. Papalia, Y. Huang, D. Rosen, B. Englot, J. Leonard" MAC: Maximizing Algebraic Connectivity for Graph Sparsification," Work-In-Progress Paper. (Link to arXiv preprint)
Y. Huang, X. Lin, and B. Englot, "Multi-Robot Autonomous Exploration and Mapping Under Localization Uncertainty via Reinforcement Learning on Graphs," Work-In-Progress Paper, Proceedings of the 21st International Conference on Ubiquitous Robots, pp. 836-839, June 2024. (Full Text)
Y. Huang and B. Englot, “Multi-Robot Autonomous Exploration and Mapping Under Localization Uncertainty with Expectation-Maximization,” IEEE IROS 2023 Workshop on Closing the Loop on Localization, 4 pp., October 2023. (Full Text)
J. Wang, F. Chen, Y. Huang, J. McConnell, T. Shan, and B. Englot, "Virtual Maps for Autonomous Exploration of Cluttered Underwater Environments," IEEE ICRA 2021 Workshop on Underwater Active Perception, 8 pp., June 2021. (Full Text, Workshop Poster, Video Attachment)
Y. Huang, H. Wang, K. Zhan, J. Zhao, P. Gui, T. Feng, "Image-based localization for indoor environment using mobile phone," The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, pp. 211-215, June 2015. (Full Text)
Thesis
Y. Huang, Inference with Factor Graphs for Single and Multi-Robot Perception and Navigation, Ph.D. Thesis, Stevens Institute of Technology, May 2025. (Full Text)
Robots
In recent years, I have had the honor of working with the following robots:
Clearpath Jackal


Unitree Go2

Blue Robotics BlueRov2


Blue Robotics Blueboat